High-Dynamic-Range and High-Resolution Radar. FMCW radar systems are an integral part of various applications. Yet, because the received power from a target scales as R^(-4), these systems are susceptible to dynamic range limitations. One prominent challenge is the near-far problem, where weak and strong signals cannot be detected simultaneously. This issue is evident in real-life scenarios such as detecting humans near large objects (e.g., trucks) and is expected to become even more significant as radar systems gain prominence in emerging technologies for autonomous driving and health monitoring.
From a sensing architecture perspective, the near-far problem reflects a fundamental trade-off between dynamic range and bit depth. On the one hand, limited dynamic range can result in a permanent loss of information due to signal saturation and clipping. On the other hand, for a fixed bit budget, increasing the dynamic range entails a coarse bit resolution and thus results in high quantization noise.
The USF presents a unique solution in the context of high-dynamic-range (HDR) and high-resolution (HRes) sensing. That is because based on the amplitude folding principle, an HDR signal is recorded in a low-dynamic-range domain. Consequentially, quantization can be performed on a fine scale, and high-resolution can be obtained.
The Forward Model. The system is based on a mono-frequency Doppler radar with one transmit and one receive antenna. For \(K\) targets located at ranges \(R_{k}\) with respective radial velocities \(v_{k}\), the demodulated Doppler signal can be expressed as
\[r(t) = \sum_{k=1}^{K} \alpha_k \cos(2 \pi f_{D}^{k} t + \theta^{k}),\]
where \(\alpha_k\) is the amplitude, \(f_{D}^{k}= (2 v_k f_0)/(c)\), \(\theta^{k}\) captures the phase resulting from both the range \(R\) and the demodulation process. \(f_0\) is the operating frequency of the radar, and \(c\) is the speed of light.
The radar signal is digitized using the M-ADC where the modulo signal \(\mathscr{M}_{\;lambda}(r(t))\) is discretized and quantized. The forward model is,
where \(\mathcal{Q}_{b}^{\lambda}\) denotes a mid-rise quantizer with \(b\) bits and dynamic range of \(\pm \lambda\).
The Inverse Problem. The task of ranging based on the forward model above is equivalent to solving the inverse problem of finding the frequencies of a sum-of-sines from the modulo samples.
To achieve this, US-ALG is used to unfold the samples, and tone-detection techniques are used to find the frequencies.
A real-time processing and data-visualization of the US-Radar can be found here.
This proof-of-concept shows up to \(20\) times DR enhancement on semi-synthetic data.
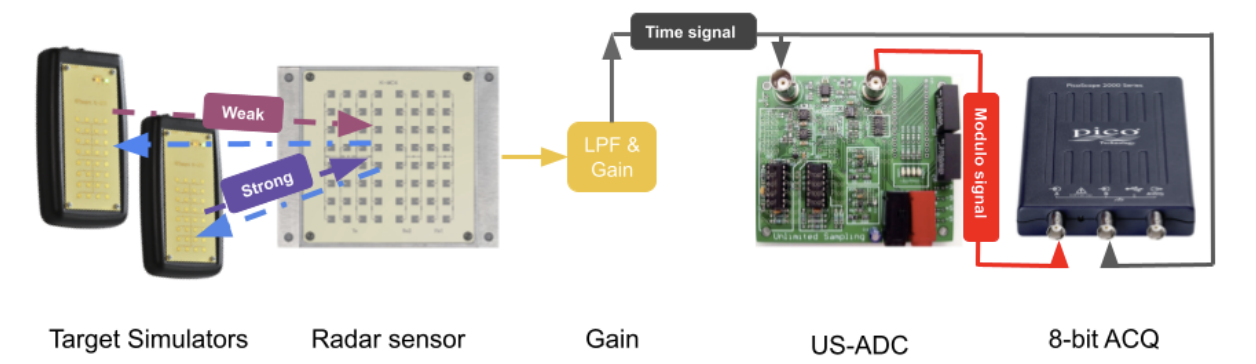
An end-to-end implementation of the US-Radar was also realized based on the following setup.
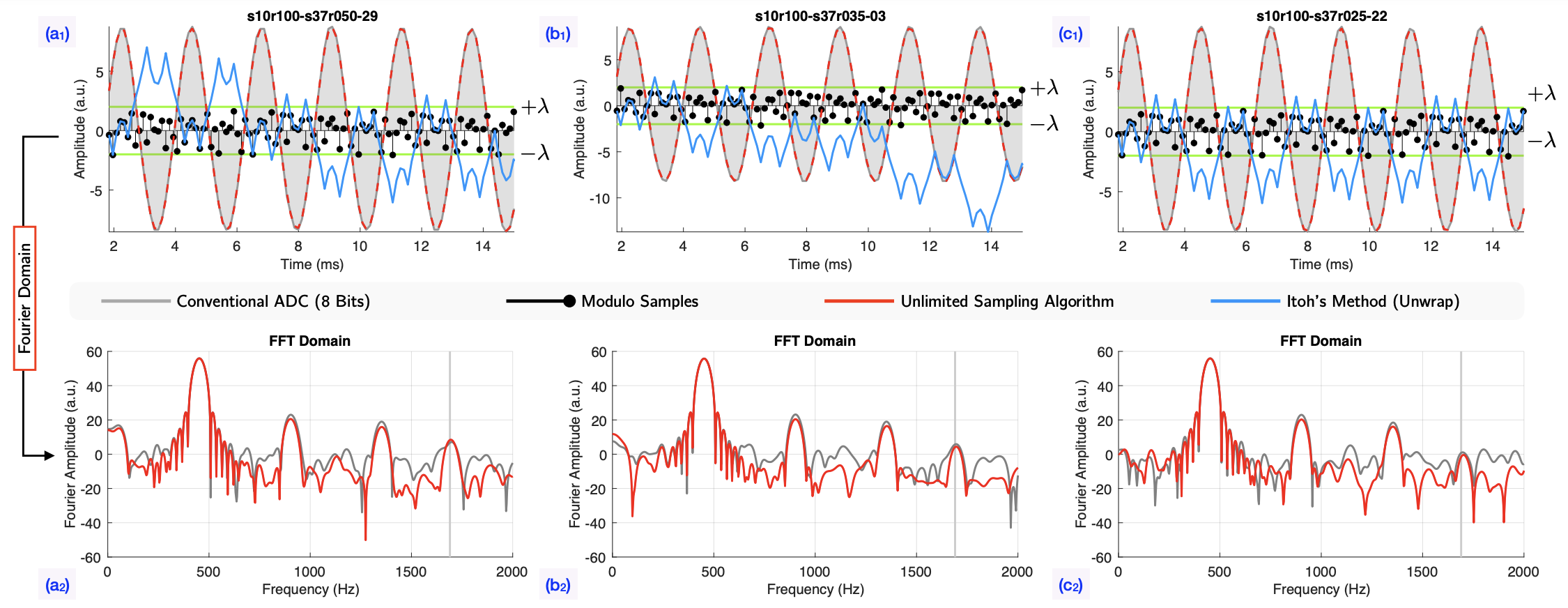
Then, the capabilities of the system for weak adn strong signal detection was evaluated.
As shown below, as the power of the weak target decreases, its associated peak falls below the noise floor of a conventional radar system, while it can still be identified from the US-Radar measurements.