Diary of May 2002 16-31
May 16, 2002I wrote new PIC code that intercepts serial input even during projection, using the KBHIT function (tp2_cont.c) (Figure 114). It works nicely with the Java iDen phone. I also fixed several other bugs: messed up character templates; detects now both lowercase and uppercase single characters; preset lines are limited to 8 characters, etc.
I wrote another version of the PIC code that detects a drop of the photodiode pin (tp2_ger.c): it starts the blinking sequence only when there is a high pin immediately before a low pin. This was a suggestion of Gerardo. It did not make the jitter go away, but the projector misses now many cycles. I did not pursue this approach.
I made a new servo arm out of aluminum, salvaged from a square aluminum tube. I removed the ABS one (although it was glued with Epoxy, it came off easily), Krazy glued the aluminum arm to the motor, and oiled the pushrod/hole with WD40.
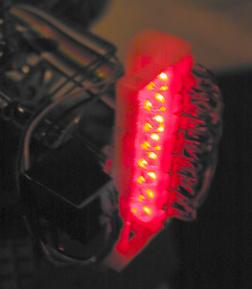
The projection is now stable: the beginning of the sentence certainly is, the end (after 8 characters) fluctuates a little, due to irregular rotational speed of the motor. Basically, the length of the sentence varies with the speed of the motor. If the motor speed goes up, the sentence gets stretched, etc.
I took several pictures and movies of the projection (Figure 115). (Choosing the amount of ambient light turned out to be tricky, because it is either too dark and the projection gets smeared, or too bright and then the projection does not have a lot of contrast.)
Since the jitter was almost gone, I conclude that the jitter problem must have been caused by mechanical slack of the hole in the plastic crank arm that holds the pushrod.
Logically, the still remaining jitter could be due to the connection of the pushrod with the mirror, which starts to get loose, too. To make the projection even more stable, I should make a new mirror with an aluminum holder. (But I have to unglue the servo arm from the motor, which is a pain, even with the Krazy glue remover.)
May 17, 2002I tried to make a PIC software version that reads the serial port during the delay time before the blinking sequence. I didn't succeed.
Fixed other bugs in the PIC software, e.g., initial waiting time is now 16.5ms (16500 us).
Started designing an outer hull for the projector, which was going to be prototype 10.
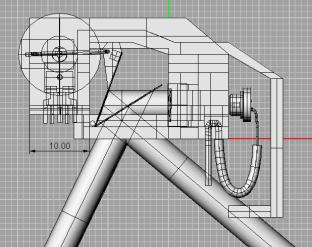
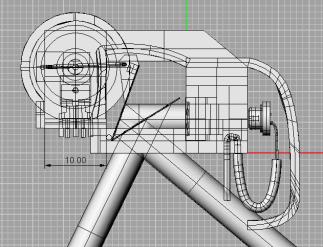
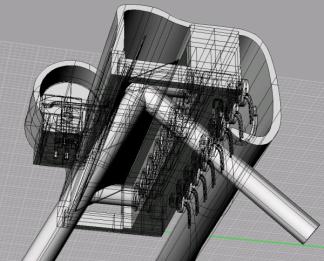
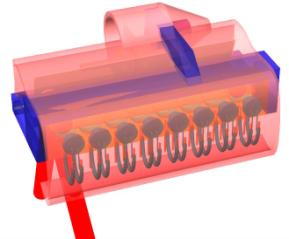
May 18, 2002I made a 3D model of all elements, in order to model the outer hull of prototype 10. Made two versions: hull with straight walls (TinyProjector2_all_v3.3dm), and hull with curved walls (TinyProjector2_all_v4.3dm) (Figure 116)
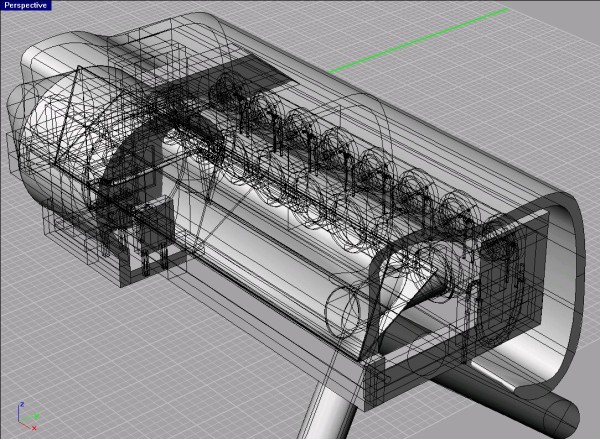
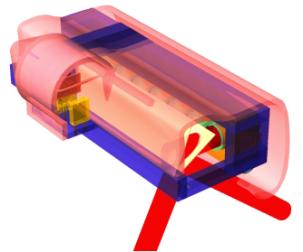
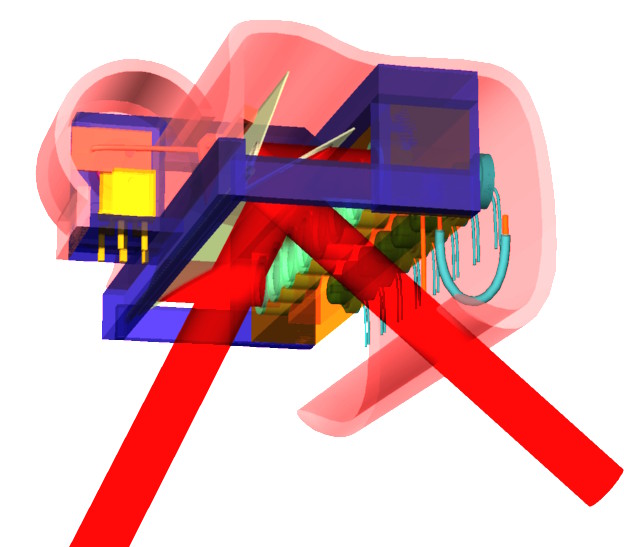
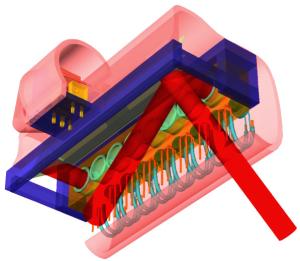
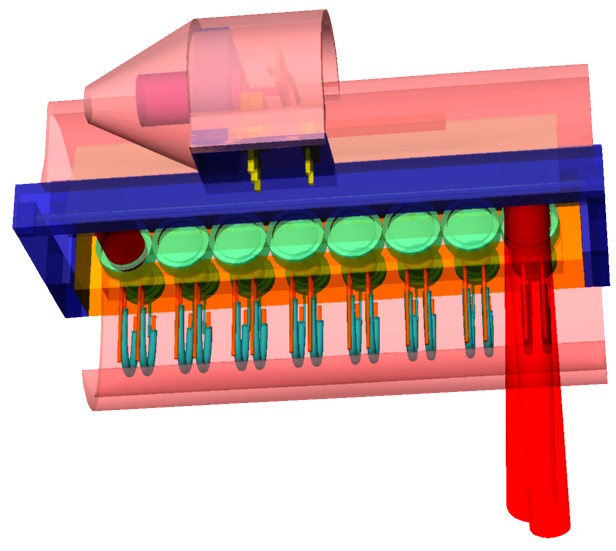
May 19, 2002I refined the complete 3D model (TinyProjector2_all_v5.3dm), and created some 3D snapshots of hull (Figure 117). It is still not complete, since the motor compartment is not done yet.
Send me some comments! Copyright © 1997-2004 by Stefan Marti and MIT Media Lab. All rights reserved | |||||||||||||||||||||||||||